Before going headlong, a little bit of thinking must be done to avoid some shortcomings in the material design.
Here is an example of this:
What if one day it proves necessary to synchronize the network modules precisely?
No problem, an interruption can be generated when a frame is received on the CAN network. This way, all modules on the network can synchronize their clocks. The tolerance (jitter) would be in the microsecond range. Note also that some microcontrollers make a timestamp at the arrival of a frame. But the timer used for this purpose is based on the clock frequency of the CAN device, which is not necessarily optimal for timing.
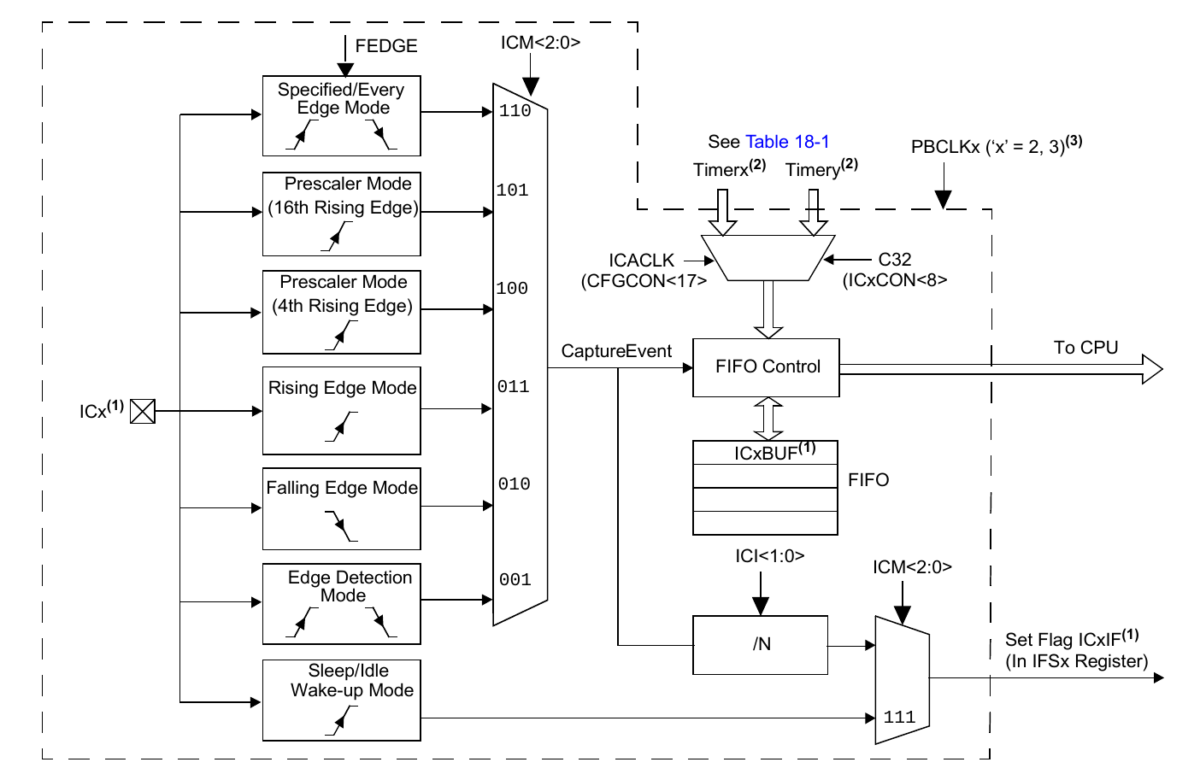
A solution: connect the Rx input of the CAN to the input Capture (IC) peripheral of the microcontroller. This requires no additional components, and the IC is coupled to a timer with a source frequency of up to 100 [Mhz]. Thus, the synchronization of the modules in the network can be done without any problems with a jitter lower than 100 [nS].
Categories
Sycronization : an important detail